

ISO 16787 - Inteligentní dopravní systémy – Systémy asistovaného parkování – Funkční požadavky a zkušební postupy
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Rok vydání normy a počet stran: Vydána 2016, 33 stran
Rok zpracování extraktu: 2016
Skupina témat: inteligentní dopravní systémy
Téma normy: vozidlové asistenční systémy řidiče
Charakteristika tématu: přechodové stavy kontrolní funkce metody testování a jejich vyhodnocení funkční a provozní požadavky
popis systému
popis strategie řízení; popis provozních parametrů a odezvy systému; popis strategie manévrování vozidla
asistenční funkce pro autonomní parkování (podélné a příčné vedení vozidla)
klasifikace systémů s ohledem na sledovanou oblast okolo vozidla specifikace HMI rozhraní
stavový diagram relace; definice testovacích metod;
definice rozsahu detekce; definice chybných reakcí; definice provozních limitů kritéria pro aktivaci/deaktivaci systému, specifikace samokontroly systému
specifikace parametrů systému s ohledem na způsob parkování; definice parametrů parkovacího slotu; specifikace provozních limitů systému
Úvod
Systémy asistovaného parkování (APS) se skládají z bezkontaktních senzorů a kontroly řízení, které pomáhají řidiči při parkování vozidla. Podpora začíná hledáním vhodného parkovacího místa, získáním informací o okolí vozidla (mapa prostředí), výpočtem trajektorie a následným podélným vedením vozidla. Systém musí rovněž napomáhat řidiči při rozpoznávání překážek během manévrování vozidla do volného parkovacího místa.
Užití
Norma APS je určena pro lehká nákladní vozidla, například osobní vozidla, pick-upy, lehká dodávková vozidla a sportovní vozidla (mimo motocyklů), jež jsou vybavena systémem APS. Tato norma stanovuje minimální funkční požadavky, které řidič může od systému očekávat, jako například rozpoznání vhodného parkovacího prostoru, výpočet trajektorie a podélné vedení vozidla. V rámci funkcionality systému mohou být zahrnuty i informace o přítomnosti relevantních překážek v jízdě vozidla. Tato norma stanoví i množinu požadavků v případě indikace chyby, stejně tak i funkční požadavky a zkušební postupy. Obsahuje pravidla pro obecnou strategii poskytování informací, přičemž neomezuje druh informací ani systém pro znázornění informací.
Pro orgány státní správy a projektanty pozemních komunikací přináší norma technické informace a specifikaci požadavků na zavádění systému APS v rámci dopravní infrastruktury.
Pro výrobce vozidlových systémů a palubních jednotek je norma nepostradatelná, protože definuje provozní požadavky na systém APS včetně technických parametrů a dále požadavky na testování systému.
1. Předmět normy
Systém APS je zamýšlen, aby poskytoval řidiči asistenční funkce pro autonomní parkování. APS systém hledá vhodné parkovací místo pro odstavení vozidla mezi jinými zaparkovanými vozidly nebo vodorovným dopravním značením, vyhodnocuje požadované informace s ohledem na výpočet trajektorie parkování a zasílá řídící příkazy do elektronického rozhraní systému řízení vozidla pro účely příčného vedení vozidla během parkovacích manévrů.
Jako volitelné rozšíření může systém APS nabízet omezené vedení vozidla v podélném směru, například brzdový asistent při manévrování do volného parkovacího místa. Během parkovacího manévru může řidič převzít řízení pohybu vozidla a je rovněž plně odpovědný za parkovací manévr.
Systém APS využívá objektově orientovaná zařízení pro detekci a měření vzdálenosti za účelem nalezení vhodného prostoru pro parkovací místa. Takovými to zařízeními mohou být senzory obsahující informaci o vzdálenosti nebo opticky orientované systémy. Kromě toho mohou být využity senzory nebo řídicí jednotky, stejně tak i relevantní data dostupná na vozidlové sběrnici (například CAN) pro výpočet relativní polohy vozidla vůči parkovacímu místu.
2. Souvisící normy
ISO 17386 Pomoc při manévrování při nízkých rychlostech MALSO
ISO 22840 Podpůrné systémy při couvání ERBA
ISO 2575:2004 Symboly pro ovládací prvky, indikátory a sdělovače
ISO 15006:2004 Silniční vozidla — Ergonomická hlediska informačních a řídicích systémů — Specifikace a postupy hodnocení shody pro prezentaci zvukových informací ve vozidle
ISO 15008:2003 Silniční vozidla — Ergonomická hlediska dopravních informačních a řídicích systémů — Specifikace a postupy pro posouzení shody vizuální prezentace informací ve vozidle
ISO 16750:2003 (všechny části) Silniční vozidla — Provozní podmínky a testování elektrických a elektronických zařízení
3. Termíny a definice
Kapitola obsahuje 17 termínů a definic souvisících s touto normou. Klíčové termíny jsou následující:
asistenční parkovací systém (assisted parking system) – systém schopný měřit rozměry volného parkovacího místa, vypočítat vhodnou trajektorii, provádět boční vedení vozidla při manévrování do volného parkovacího místa a poskytovat potřebné instrukce řidiči
režim hledání volného místa (slot search mode) – pracovní režim ve kterém systém APS prohledává okolí pro nalezení vhodného volného parkovacího místa
režim asistovaného parkování (assisted parking mode) – automatizované příčné vedení vozidla (například natáčením volantu) systémem APS během parkovacího manévru zatímco řidič přejímá kontrolu nad rychlostí vozidla a směrem jízdy
linie vymezující volné parkovací místo (parking slot defining lines) – jasnou barvou namalované linie na povrchu vozovky umožňující identifikaci hranice vymezeného volného parkovacího místa
4 Rozdělení APS systémů a specifikace základních požadavků
Systém APS rozpoznává parkovací místa, kde může být vozidlo odstaveno, stanovuje cílovou polohu vozidla a vypočítává trajektorii parkovacího manévru.
Systém APS během parkovacího manévru automaticky navádí vozidlo do cílové polohy prostřednictvím ovládání volantu. S ohledem na průběžný stav řízení musí relativní poloha vozidla splňovat vůči cílové poloze vozidla specifické požadavky na přesnost.
Norma se odvolává na reálné systémy dostupné na trhu s ohledem na skutečnost, kdy chování řidiče během parkování a podmínky parkování ve městě jsou jedinečné pro každou zemi nebo okres. Norma popisuje dva druhy APS systémů s ohledem na cílové parkovací místo.
APS typu 1: APS systém, u kterého je cílovým místem prostor mezi dvěma vozidly.
APS typu 2: APS systém, u kterého je cílové místo stanoveno vodorovným dopravním značením, jakým jsou namalované vodící čáry.
Pro oba typy je možná jak podélné, tak i kolmé parkování.
Systém APS musí přerušit mód asistovaného parkování, pokud je splněna jedna nebo více následujících podmínek.
řidič ovládá řízení, aby převzal kontrolu
systémem APS je detekována interní chyba
rychlost vozidla překročí maximální limit pro mód asistovaného parkování
Mezi volitelné podmínky pro přerušení módu asistovaného parkování patří:
příliš mnoho manévrovacích úkonů bez úspěchu při parkování
detekován přívěsný vozík
5 Funkční požadavky a zkušební postupy pro systém APS typu 1
Systém APS typu 1 musí podporovat buď podélné nebo kolmé parkování nebo obě varianty.
Parkovací manévr musí být proveden na volném parkovacím místě ohraničeným dvěma vozidly srovnatelného modelu jako předmětné vozidlo a volitelně obrubníkem v příčném směru. Je doporučeno, aby byl systém schopen detekovat referenční obrubník.
Volné parkovací místo je definováno svou délkou x0 a hloubkou y0 (viz. obr. 1), přičemž. x0 představuje vzdálenost mezi dvěma referenčními vozidly. Hloubka y0 představuje vzdálenost mezi vnější obrysovou linií referenčního vozidla a obrubníkem.

Následující diagram znázorňuje příklad posloupnosti úkonů provozních režimů, korespondující informace poskytované řidiči v každém provozním režimu a rovněž jaké aktivity jsou očekávány od řidiče.
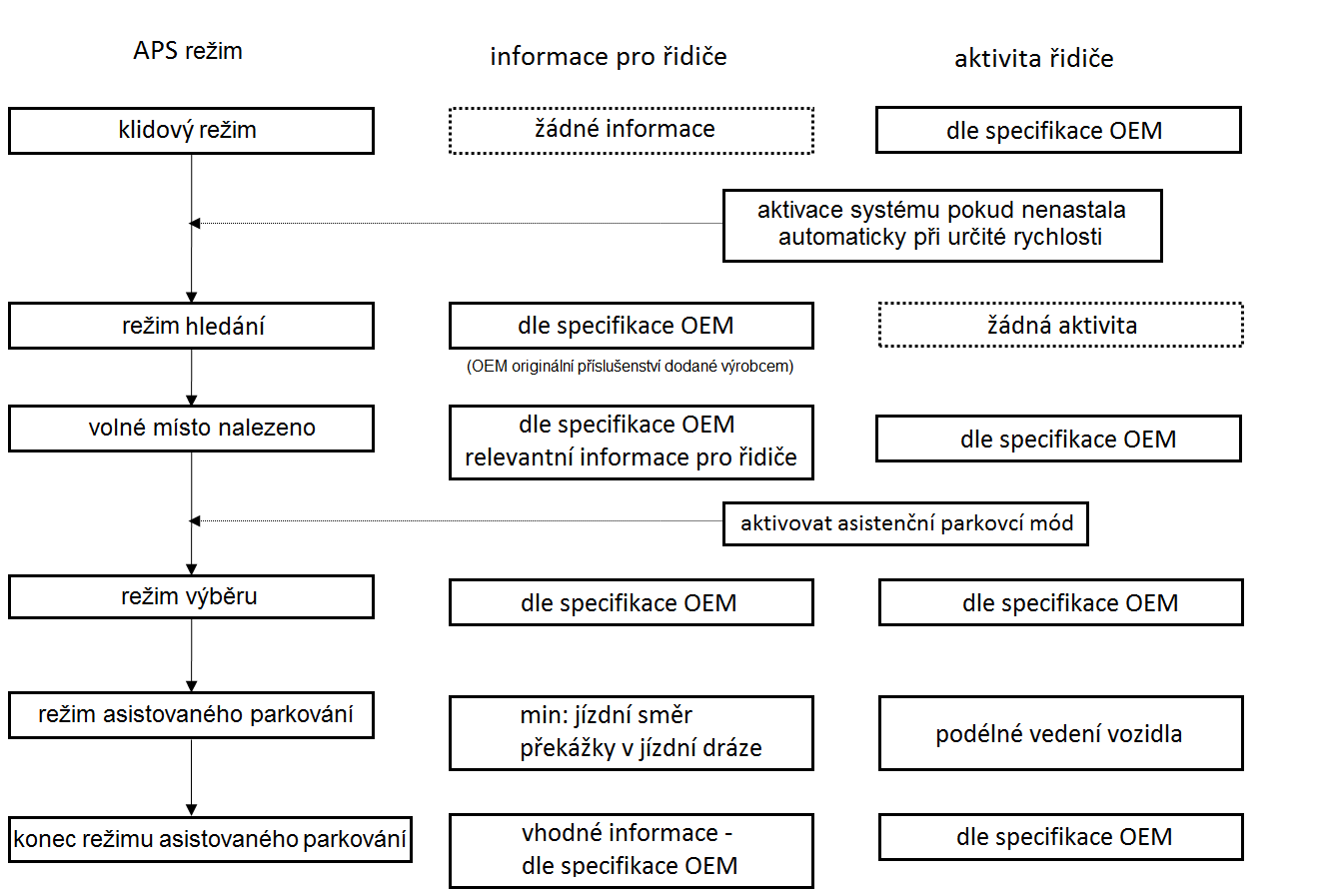
Pokud je systém aktivní, může přepínat mezi jednotlivými provozní režimy navzájem “režimem hledání”, “nalezené volné místo”, “režimem výběru” a “režimem asistovaného parkování” v závislosti na aktuální situaci a aktivitě řidiče.
Rozhraní řidiče a informační strategie
Systém by měl informovat řidiče o aktuálním provozním režimu (například hledání volného místa, volné místo nalezeno, režim asistovaného parkování, chybový režim) a musí poskytovat řidiči instrukce, které jsou pro parkovací manévr vyžadovány.
Varování by mělo být vydáno ještě před tím, než započne automatické otáčení volantem.
Systém musí informovat řidiče, jakmile všechny nezbytné předpoklady k zahájení manévrování do volného parkovacího místa jsou splněny a systém APS je přepnut do režimu asistovaného parkování.
Systém APS může v režimu asistovaného parkování poskytovat řidiči další doplňující informace, jakými jsou instrukce pro zařazení příslušného převodového stupně nebo doporučení aktuální rychlosti. Řidič musí být informován, jakmile systém APS ukončí parkovací manévr a ukončí řízení vozidla v příčném směru (řízení je uvolněno až po ukončení režimu asistovaného parkování).
V případě, že je systém v režimu hledání volného místa, musí být splněny následující minimální požadavky systému.
| Typ 1 podélné řazení vozidel | Typ 1 kolmé řazení vozidel |
podporovaná rychlost vozidla Vsearch | ≤ 30 km/h | ≤ 20 km/h |
podporovaný boční odstup od parkujících vozidel | 0,5 … 1,5 m | 0,5 … 1,5 m |
jízdní dráha | přímá | přímá |
maximální úhel mezi APS vozidlem a spojnicí ohraničující vozidla | 5° | 5° |
Funkční požadavky během režimu asistovaného parkování
APS typ 1: Maximální rychlost podporovaná systémem během parkovacího manévru musí být alespoň 5 km/h. Je doporučeno omezit rychlostní rozsah během režimu asistovaného parkování a přerušit režim asistovaného parkování, pokud vozidlo tento limit překročí. Doporučené rozmezí pro rychlostní limit je (5 km/h … 12 km/h). Vozidlo musí dodržet trajektorii zabraňující kolizi s objekty detekovanými systémem APS.
6 Funkční požadavky a zkušební postupy pro systém APS typu 2
Systém APS na základě rozpoznání vodorovného dopravního značení, jakým jsou namalované vodící čáry, lokalizuje volné parkovací místo vhodné pro odstavení vozidla, určí cílové volné parkovací místo a vypočítá doporučenou trajektorii pohybu.
Na příkladu podélného parkování je znázorněn popis testovaných parametrů parkovacího místa systému APS typu 2.
Rozpoznání volného parkovacího místa by mělo být testováno na volném parkovacím místě srovnatelných podmínek, jak je znázorněno na obr. 3, kde jsou uvedeny typické rozměry zkušebního cíle, ze kterých výrobci vozidel mohou vybrat odpovídající polohu vozidla pro test.
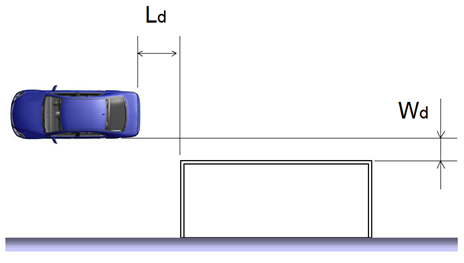
Kde:
Ld = Lv x 0.5 ±0.5(m)
Wd = Vw x 0.5 ±0.5(m)
Lv: délka vozidla
Vw: šířka vozidla
Příloha A (informativní) – Otevřené otázky
Tato příloha obsahuje otevřené otázky, které se stále diskutují. Následně vydaná rozhodnutí budou obsažena v příloze B. Poté, co budou otevřené otázky kompletně vyřešeny, budou z přílohy A odstraněny a ponecháno konečné rozhodnutí v příloze B.
Příloha B (informativní) – Rozhodnutí
Tato příloha obsahuje rozhodnutí učiněná pracovní skupinou ISO/TC204/WG14 k jednotlivým otevřeným otázkám.
Příloha C – Příklad posloupnosti činností systému APS
Příklad posloupnosti činností systému asistovaného parkování, kdy funkce systému APS jsou vykonávány v následujících krocích:
(1) Umístění vozidla
Řidič by měl manuálně navést vozidlo do polohy, kde jsou senzory schopny detekovat volné parkovací místo, viz obrázek 4 obsahující směrové šipky z bodu (1 → 2)
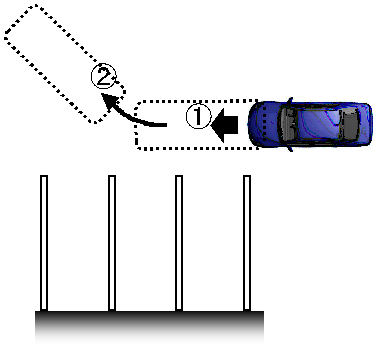
(2) Přepnutí hlavního vypínače do polohy ON (zapnuto)
Systém by měl mít pro potřeby ovládání řidičem hlavní vypínač. Poté co řidič aktivuje hlavní vypínač, je provedena sekvence úkonů definovaná řídicím režimem asistovaného parkování. V případě, že řidič hlavní vypínač vypne, všechny kontrolní funkce prováděné systémem APS musí být zrušeny.
(3) Rozpoznání volného parkovacího místa
Systém APS rozpozná volná parkovací místa, vhodná pro odstavení vozidla, například z vodicích čar nasnímaného obrazu nebo pokrytím rastrové sítě obrazu z téhož senzoru.
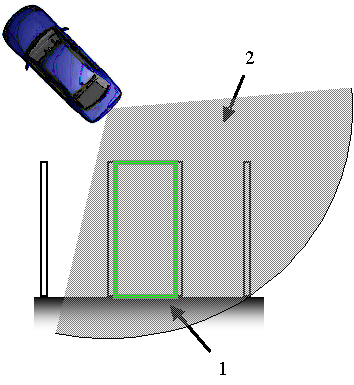
Kde:
1 – rozpoznané volné cílové parkovací místo
2 – sensor FOV (zorné pole)
Metoda překrývajícího se zobrazení, jako například pohled svrchu vozidla nebo přímé zobrazení obrazu ze senzoru, závisí na návrhu výrobce a v tomto smyslu nejsou stanovena žádná omezení.
(4) Potvrzení výběru volného cílového parkovacího místa řidičem
systém by měl být schopen informovat řidiče o nalezených vhodných volných parkovacích místech
řidič by měl být schopen potvrdit začátek ovládání systémem před tím, než se vozidlo začne pohybovat směrem k volnému cílovému parkovacímu místu detekovanému systémem nebo označenému řidičem
(5) Asistované parkování
pokud se řidič rozhodne odstavit vozidlo do nalezeného vhodného volného parkovacího místa a zastaví vozidlo, systém APS by měl řidiči poskytnout asistenci jak formou pokynů, tak ovládáním řízení během parkovacího manévru
varování může být vydáváno v předstihu, aby upozornilo řidiče na větší opatrnost, před tím než se volant začne automaticky otáčet
schopnost systému pomoci při parkovacím manévru závisí na aktuální výchozí poloze vozidla s ohledem na polohu volného parkovacího místa. Omezení přípustných výchozích postavení vozidla by mělo být popsáno v příručce uživatele vozidla
ovládání řízení vozidla by nemělo být zahájeno dříve, než se vozidlo zastaví
řidič musí být schopen převzít ovládání vozidla v příčném směru v jakémkoli časovém okamžiku. V takovém případě musí systém APS okamžitě ukončit automatické ovládání řízení vozidla.
(6) Ukončení asistovaného parkování
řidič by měl být informován v případě, že je parkovací manévr ukončen nebo přerušen.