

ISO 19237 - Inteligentní dopravní systémy – Systém pro detekci chodců a zmírňování (následků) kolizí – Funkční požadavky a zkušební postupy
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Rok vydání normy a počet stran: Vydána 2017, 21 stran
Rok zpracování extraktu: 2017
Skupina témat: inteligentní dopravní systémy
Téma normy: Asistenční systémy vozidel
Charakteristika tématu: Systém pro detekci chodců a zmírňování následků kolizí s nimi.
Požadavky na minimální funkce a; definice testu odpovídající funkčnosti.
Architektura je definována jednoduchým diagramem funkčních bloků. Základní funkce definuje stavový diagram s definovanými přechody.
Návrh asistenčního systému pro silniční vozidla, který má za úkol detekovat chodce a iniciovat/učinit co možná nejúčinnější kroky pro zabránění střetu, případně minimalizovat jeho následky, jestliže mu nelze zabránit (např. snížením nárazové rychlosti).
Je definována pouze funkcionalita systému a její test. Rozhraní ani návaznost na jiné systémy nejsou předmětem.
Procedura určení kladného výsledku testu.
Běžné fyzikální jednotky: rychlost, délka, osvětlení.
Je definována minimální a maximální rychlost a vzdálenost objektu pro vyžadovanou funkčnost systému. Testovací podmínky jsou definovány pomocí vzdáleností, osvětlení, rychlosti.
Úvod
Počet dopravních nehod, při kterých dochází ke kolizím automobilu s chodci, jejichž důsledkem je usmrcení chodců či jejich závažná zranění, tvoří významný podíl na celkové bilanci nehod. Systém pro detekci chodců a zmírňování následků kolizí – anglicky Pedestrian Detection and Collission Mitigation Systems (PDCMS) – má za úkol eliminovat výskyt střetů a snížit závažnost střetu s chodcem v případě, že se mu nelze vyhnout. Jestliže je systémem situace vyhodnocena jakožto velmi pravděpodobná kolize, je spolu s varováním před kolizí automaticky aktivováno nouzové brzdění a PDCMS asistuje zpomalování vozidla. Obrázek 1 znázorňuje funkční bloky PDCMS.
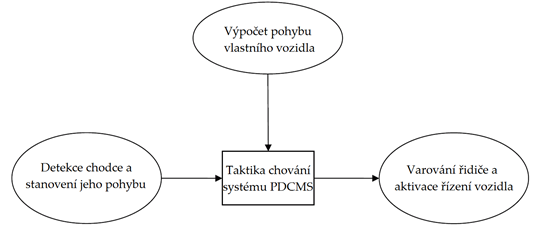
Legenda:
I. - Výpočet pohybu vlastního vozidla
II. - Detekce chodce a stanovení jeho pohybu
III. - PDCMS Taktika chování
IV. - Varování řidiče a aktivace řízení vozidla
Návrháři systémů a další uživatelé tohoto standardu jej mohou využít pro samostatné PDCMS nebo k integraci funkcí PDCMS do jiných systémů asistence a podpory řízení vozidla. ISO/TR 12204 byla připravena technickou komisí ISO/TC 204.
Užití
Dokument slouží návrhářům a výrobcům systémů automobilů (specificky jejich asistenčních a bezpečnostních systémů) a těm, kteří ověřují/zkoušejí jejich funkce.
1. Předmět normy
Popisovaný dokument stanovuje koncept práce PDCMS, minimálních požadavky na jejich funkcionality, systémová rozhraní, dále pak definuje řadu zkušebních postupů pro takové systémy (tedy požadavky na chování PDCMS a testovací kritéria, která musí splnit každá výrobcem vytvořená implementace systému). Volba konkrétní implementace je ponechána na výrobci.
PDCMS snižuje závažnost střetu s chodcem (v případě, že mu nemůže být zamezeno) a může tak snížit úmrtnost a závažnost zranění při takových kolizích. PDCMS ke své funkci vyžaduje informace o pozici chodce vůči vlastnímu vozidlu, o pohybu chodců, o pohybu vlastního vozidla a o zásazích řidiče. PDCMS detekuje chodce před vozidlem, určuje, zda tito představují nebezpečí a varuje řidiče, jestliže takové nebezpečí existuje. Systém odhaduje, zda má řidič možnost adekvátně na takové nebezpečí reagovat a pokud pro takový zásah řidiče není dostatečný čas (a jsou splněna náležitá kritéria), pak systém vyhodnotí hrozbu kolize jako bezprostřední, na základě čehož aktivuje varování před kolizí a vozidlo začne brzdit, aby tak snížilo závažnost kolize.
Popisovaný dokument, přestože se nejedná o standard pro systém vyvarování se kolizi, nevylučuje, aby výrobce implementoval PDCMS dohromady se systémem vyvarování se kolizi. Systémy, které v sobě zahrnují další opatření, jako například vynucené řízení volantu, nejsou předmětem tohoto standardu. Zodpovědnost za bezpečné vedení vozidla zůstává na řidiči. Tento dokument se týká lehkých užitkových a osobních vozidel a netýká se jiných kategorií vozidel, jako jsou například nákladní vozidla nebo motocykly. PDCMS nejsou určeny pro nasazení mimo zpevněné vozovky.
2. Souvisící normy
Dokument navazuje a odkazuje se na následující normy a směrnice:
ISO 19206-2 Silniční vozidla – Testovací nástroje pro cílová vozidla, zranitelné účastníky provozu a další objekty, dále pro hodnocení funkcí aktivní bezpečnosti – Část 2: Požadavky na cílové chodce
ISO 1176 Silniční vozidla. Hmotnosti. Terminologie a kódy.
ISO 19476:2014 Popis provozu přístrojů na měření iluminance a luminance
United Nations Economic and Social Council World Forum for Harmonization of Vehicle Regulations (WP.29) TRANS/WP.29/78/Rev.2
United Nations Economic and Social Council World Forum for Harmonization of Vehicle Regulations (WP.29) TRANS/WP.29/1045.
FMVSS No. 105; Hydraulic and electric brake systems
3. Termíny a definice
Dokument definuje 12 specifických termínů.
varování před kolizí (Collision Warning (CW) – varovný systém, který varuje před možnou kolizí s chodcem ve směru jízdy vlastního vozidla
převzetí řízení řidičem (Driver Override) – řidičem iniciované potlačení funkce EB nebo CW
nouzové brždění (Emergency Braking (EB)) – akce PDCMS, která reaguje na detekci neodvratné kolize s chodcem tím, že aktivuje automatické brždění k rychlému snížení relativní rychlosti
těžká vozidla (Heavy Vehicle) – jakékoliv jednotlivé vozidlo nebo souprava definovaná v kategorii 1-2 nebo v kategorii 2 ve směrnici Spojených národů TRANS/WP.29/1045
místo střetu (Impact Position) – místo (laterální pozice) střetu vlastního vozidla nebo předpokládaná laterální pozice kontaktu vlastního vozidla ve chvíli, kdy dochází ke kolizi nebo kdy je kolize předpokládána
osobní a lehká užitková vozidla (Light Duty Passenger Vehicle) – vozidla kategorie M1 (s osmi a méně pasažéry vyjma řidiče) dle směrnice TRANS/WP.29/78/REV2
minimální snížení rychlosti PDCMS (Minimum PDCMS Sped Reduction) – minimální snížení rychlosti systému PDCMS, které při reakci musí dosáhnout
minimální rychlost (Minimum Velocity (Vmin)) – minimální rychlost vlastního vozidla, při které je PDCMS schopen zajistit funkci
chodec (pedestrian) – lidská bytost na silnici nebo v její bezprostřední blízkosti
kolize s chodcem (Pedestrian Collision) – kolize mezi vlastním vozidlem a chodcem
vlastní vozidlo (Subject Vehicle (SV)) – vozidlo vybavené PDCMS tak, jak je definován v rámci tohoto dokumentu
cílový chodec (Target Pedestrian (TP)) – chodec, který se nachází v poli záběru senzoru vozidla a který by mohl být potenciálně zasažen vozidlem
4. Symboly a zkratky
V dokumentu jsou zmíněny zkratky běžné v oboru (ABS, ESC…) a zkratky definované v kapitole 3. Jsou zde symboly užívané dále v textu, a to:
Vsv- rychlost vlastního vozidla
vtpL- laterální rychlost cílového chodce
Ld- (laterální) vzdálenost mezi průjezdem vlastního vozidla a TP
xc- (longitudální) vzdálenost mezi SV a TP (ty ilustruje obrázek 2 v původním dokumentu).
5 Požadavky na systém
5.1 Minimální schopnosti systému
Tato kapitola stanovuje (výčtem) 10 funkcí, kterých musí být schopno osobní vozidlo s PDCMS:
I. detekovat přítomnost chodců, u detekovaných chodců určit jejich vzdálenost, směr a rychlost
II. určit rychlost vlastního vozidla
III. iniciovat adekvátní chování PDCMS
IV. zajistit varování řidiče před kolizí
V. aktivovat a přizpůsobit brzdění nezávisle na tom, zda již řidič sám brzdit začal
VI. ovládat brzdová světla
VII. posílit brzdění řidičem o funkce systému ESC a dosáhnout alespoň minimálního požadovaného snížení rychlosti, které je definováno v kritériích 6.2.3.1 nebo 6.3.6 po aktivaci nouzového brzdění
VIII. kdykoliv dovolit řidiči zvýšit míru brzdění vozidla na jakoukoliv vyšší až maximální míru
IX. umožnit kdykoliv řidiči převzetí řízení
X. poskytnout řidiči informaci o aktuální dostupnosti systému.
5.2 Funkční model – Stavový přechodový diagram
5.2.1 Popis funkčních stavů
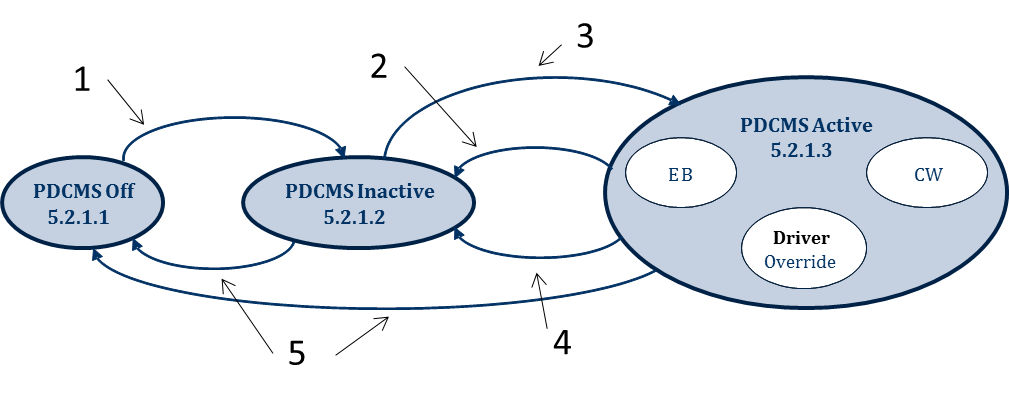
Tato kapitola ukazuje funkční model PDCMS. Systém by měl fungovat podle následujícího stavového přechodového diagramu na obrázku 2. Konkrétní implementace nad rámec je ponechána na výrobci.
| 1: Zapalování ON 2: Detekováno selhání (možno automaticky deaktivovat) 4: vsv < vmin or vsv > vmax (výjimka může být, je-li rychlost přeřízena řidičem) 5: Selhání samodiagnostiky, zapalování OFF nebo vynucení stavu OFF řidičem. |
(obr. 3 normy)
Podkapitoly 5.2.1.1 až 5.2.1.3 popisují stavy systémů:
PDCMS OFF - při vypnutém stavu systému (OFF) nevykonává PDCMS žádné akce. Po vypnutí zapalování řidičem by měl být PDCMS ve stavu OFF. Jestliže systém samodiagnostiky zjistí, že PDCMS není schopen adekvátních funkcí nebo jej řidič záměrně vypne (volitelné), PDCMS musí být ve stavu OFF. PDCMS může být ve stavu OFF i v případě, že je zapalování zapnuto.
PDCMS neaktivní,
PDCMS aktivní.
Jestliže systém detekuje selhání nebo není schopen podniknout požadovanou akci, měl by přejít do stavu neaktivní, jestliže nelze provést automatickou nápravu selhání. Stejně tak v případě selhání samodiagnostiky. Prostředky, kterými tuto informaci sdělí řidiči, jsou ponechány na výrobci.
5.3 Požadavky na funkce systému
Tato kapitola shrnuje soubor základních požadavků na PDCMS:
5.3.1 Obecné požadavky - PDCMS by se měl aktivovat za minimálních podmínek, kdy chodec přechází přímo silnici tak, jak je to naznačeno na obrázku 6 normy.
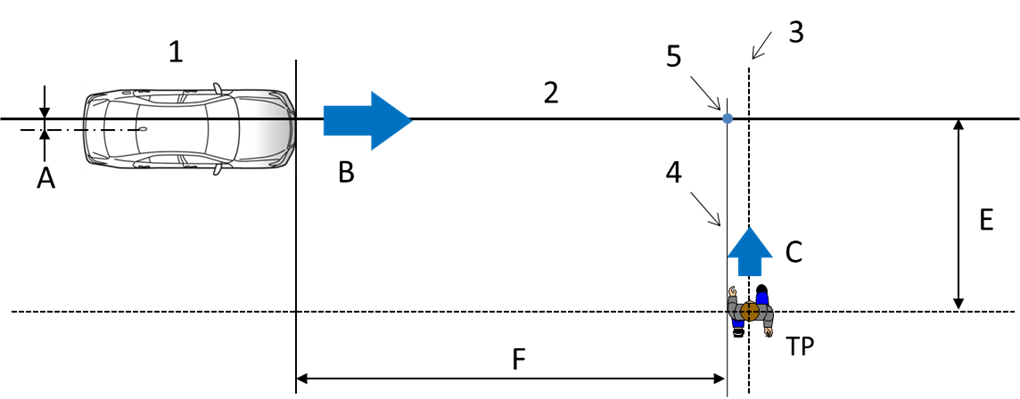
5.3.2 Pracovní rychlost – pracovní rychlost a závislosti relativních rychlostí vlastního vozidla a chodce jsou zobrazeny na obrázku 3, směr pohybu chodce a jeho rychlost ilustruje obrázek 4 normy.
Minimální rychlost vlastního vozidla (Vmin) – všechny PDCMS by měly mít Vmin 8,3 m/s (30km/h nebo nižší).
Maximální rychlost vlastního vozidla - všechny PDCMS mají minimální hodnotu Vmax 16,6 m/s (60 km/h).
5.3.3 Požadavky na akce vykonávané systémem:
Nouzové brzdění – všechny PDCMS musí poskytovat nouzové brzdění
Ovládání brzdových světel – jestliže systém vyvolá automatické brzdění, musí být adekvátně rozsvícena brzdová světla.
5.3.4 Ovládací prvky rozhraní s řidičem:
Informace o omezeních systému - řidič musí být informován o pracovních limitech systému v manuálu vozu nebo obdobně.
Indikace selhání PDCMS – řidiči musí být poskytnuta indikace, že systém je ve stavu selhání, způsobem, jaký je ponechán na výrobci.
Indikace stavu PDCMS – řidiči musí být poskytnuta indikace, že systém je ve stavu OFF, způsobem, jaký je ponechán na výrobci.
5.4 Typy PDCMS
Z hlediska požadovaných funkcí a zejména testovacích podmínek jsou definovány 2 základní typy systému:
Typ 1: PDCMS s možností aktivace za dne;
Typ 2: PDCMS s možností aktivace za dne, soumraku i v noci.
6 Zkušební postupy
Kapitola řeší podmínky testování obou typů PDCMS (dle 5.4).
6.1 Obecné požadavky
Tato podkapitola specifikuje podmínky testu společné pro oba typy, jako jsou:
6.1.1 Specifikace testovaného cílového chodce – požadavky odkazují zejména na normu ISO 19206-2;
6.1.2 Povrch testovací dráhy – suchá silnice, uniformní zpevněná vozovka se stálým stoupáním mezi 0 – 1 %, s minimálním vrcholným brzdným koeficientem (PBC) 0,9;
6.1.3 Okolní teplota – mezi 0 - 40° C;
6.1.4 Horizontální viditelnost – více jak 1 km;
6.1.5 Stav vozidla pro test – vozidlo by mělo odpovídat standardnímu „zahřátému“ vozidlu během jízdy (včetně adekvátní teploty pneumatik);
6.1.6 Hmotnost testovacího vozidla – měla by být mezi pohotovostní hmotností a pohotovostní hmotností plus hmotnost řidiče.
6.2 Požadavky testu pro systémy typu 1
Tato podkapitola specifikuje podmínky testu pro typ používaný za denního světla:
6.2.1 Okolní (rozptýlené) světlo – pro tento test je vyžadováno osvětlení prostředí vyšší než 2000 lx.
6.2.2 Zkušební postupy – situace zkušebního scénáře znázorňuje obrázek 3 (obr. 5 normy).
| 1: Vlastní vozidlo (SV) 2: Dráha vlastního vozidla 3: Dráha cílového chodce 4: Pomyslná přímka vně těla chodce 5: Kolizní bod A = 0,0m (± 0,05 m) B = vsv= 30,0 km/h (± 0,25 km/h) C = vtpL = 5,0 km/h (± 0,2 km/h) E = Ld = 3,0 m (± 0,05m) F = xc = 18,0 m (± 0,25m) |
6.2.3 Definice kolize – přesně vymezuje podmínky, kdy je vyhodnoceno, že došlo ke kolizi (popsáno na obrázku 6 normy).
6.3 Požadavky testu pro systémy typu 2
Tato podkapitola specifikuje podmínky testu pro systémy:
6.3.1 Okolní (rozptýlené) světlo – pro tento test za denního světla se využije postupu shodného s kapitolou 6.2. Pro testy za nízkého osvětlení je definováno okolní osvětlení < 1 lx (bez dalších zdrojů světla jakou jsou lampy či světla vlastního vozidla).
6.3.2 Zkušební scénář – situace zkušebního scénáře znázorňuje obrázek 4 (obr. 7 normy).
| LH = 4,5 m to12,0 m S = 20,0 m to 42,0 m P = S/2 (±0,5 m) D ≥ 4,0 m a = 1,0 m ± 0,1 m b = S/10 (±0,1 m) W1 = 4,0 m ± 0,1 m W2 = 3,0 m ± 0,1 m GL = 60,0 m ± 0,5 m 1: Oblast měření osvětlení 2: Start dráhy vozidla 3: Dráha vozidla 4: Dráha chodce L0 až L3: Instalované pouliční lampy |

Požadavky na instalaci lamp – podává detailní popis požadavků na vnější zdroje světla s odkazem na obrázek 4 (obr. 7 normy).
Oblast a body měření osvětlení – podává detailní popis požadavků umístění vnějších zdrojů světla vůči dráze vlastního vozidla a měřené body s odkazem na obrázek 4 (obr. 7 normy).
6.3.3 Měření osvětlení – provádí se nástrojem splňujícím normu ISO 19476:2014. Postup je znázorněn na obrázku 8.
6.3.4 Hodnoty osvětlení - jsou specifikovány tabulkou 1 v popisovaném dokumentu.
6.3.5 Zkušební postupy – jsou podrobně popsány v této podkapitole a vychází ze situace definované na obrázku 4 (obr. 7 normy). Měřené body a vzdálenosti pro nastavení testu ukazuje obrázek 9 normy. Nastavení testu a směr dráhy chodce se zrcadlově otáčí pro případ levostranného řízení.
6.3.6 Splnění kritérií testu – systém odpovídá požadavkům normy, jestliže je rychlost vozidla v bodě kolize méně než 10,0 km/h při požadavku redukce rychlosti nejméně o 20 km/h, nebo dojde zásahem systému zcela k zamezení kolize s chodcem.
Příloha A (informativní)
Tato příloha podává různé přehledy o dopravních nehodách za účasti chodců (názvy kapitol jsou samovysvětlující).
A.1 Typy fatálních nehod chodců – v jaké situaci se nacházeli, co před nehodou dělali, statistika věku apod.
A.2 Výskyt nehod dle denní doby
A.3 Vliv osvětlení vozovky
A.4 Fatality a míra zranění
A.5 Rychlost pohybu chodce
A.6 Ambientní osvětlení místa nehody