

ISO TR 17427-2 - Inteligentní dopravní systémy – Kooperativní ITS – Rámcový přehled
Aplikační oblast: Kooperativní systémy (C-ITS)
Rok vydání normy a počet stran: Vydána 2015, 44 stran
Rok zpracování extraktu: 2016
Úvod
Tato technická zpráva poskytuje informativní rámcový přehled o kooperativních inteligentních dopravních systémech. Měla by být chápána společně se souvisejícími normami ISO 17427-1, ISO TR 17456-1 a dalšími částmi této technické zprávy a ISO 21217. Text popisuje základní rámec a komponenty kooperativních systémů (C-ITS) včetně popisu jednotlivých služeb. Cílem technické zprávy je zvýšit povědomí o problematice kooperativních systémů. Technická zpráva definuje provázanost jednotlivých ITS včetně výčtu uplatnitelnosti v provozu.
Technická zpráva explicitně nepopisuje konkrétní řešení ani datovou strukturu, kterou by bylo možné dále využívat. Popisovaná technická zpráva ale napomáhá zpřesnit funkce a provázanosti kooperativních inteligentních dopravních systémů.
Užití
Popisovaná druhá část ISO/TR 17427-2 úzce souvisí s první částí ISO 17427 – Role a odpovědnosti z hlediska architektury kooperativních ITS. Dále na tuto normu navazují další části označené 3-10, které zpřesňují požadavky, odpovědnosti a další aspekty týkající se kooperativních systémů. Norma nabízí rámcový přehled C-ITS z hlediska poskytování služeb, vzájemné komunikace, senzorů silničních systémů apod.
1. Předmět normy
ISO/TR 17427-2 rámcově popisuje a uvádí základní informace o architektuře a poskytování služeb v rámci kooperativních systémů. Jejím cílem je zvýšit povědomí o možnostech a rozvoji kooperativních systémů včetně uvedení vazeb na další normy a předpisy. TZ na druhé straně neposkytuje konkrétní řešení daných problémů či uvedení konkrétních kódů. Norma systémově C-ITS popisuje včetně využití komunikační sítě v intravilánu a extravilánu.
2. Souvisící normy
Tato norma navazuje na normu ISO 17427-1 a souvisí s ostatními částmi ISO/TR 17427, které dále zprávu více rozpracovávají a zpřesňují. Na tuto část TR navazují další normy ISO 21214, ISO 21215, ČSN ISO 24102 a další, které dále zpřesňují a definují inteligentní dopravní systémy, a to z hlediska komunikační architektury, vozidlových komponent, rozhraní a dalších systémů týkajících se kooperativních systémů.
3. Termíny a definice
Norma uvádí základní pojmy, definice a symboly. Níže jsou uveden pouze vybrané pojmy z celkových 17.
systém ve vozidle (in-vehicle system) - hardware, firmware a software ve vozidle, které poskytuje platformu pro podporu poskytování služeb na bázi C-ITS, včetně ITS stanic (ISO 21217)
4. Symboly a zkratky
Technická specifikace obsahuje 26 zkratek. Mezi nejdůležitější patří:
CVIS- Kooperativní systémy vozidlo-infrastruktura (Cooperative vehicle infrastructure systems)
HMI- rozhraní člověk stroj (Human-Machine Interface)
CALM- komunikační infrastruktura pro pozemní mobilní zařízení (Communications Access for Land Mobiles)
5 Přehled komponent C-ITS systému
5.1 Specifikace služeb dostupných v C-ITS
Rozdíl mezi obecným „ITS“ systémem a „C-ITS“ je, že C-ITS systémy jsou závislé na interakci s jinými vozidly nebo s infrastrukturou, jež umožní poskytnutím dat aktivovat funkci kooperativního systému, nebo naopak poskytnutím dat ostatním vozidlům či infrastruktuře umožní využití jejich C-ITS komponent.
Kooperace z hlediska C-ITS znamená spolupráci na dvou úrovních:
přímá komunikace a výměna příslušných informací mezi subjekty;
dynamická interakce mezi účastníky silničního provozu nebo mezi účastníky silničního provozu a dopravní infrastrukturou ve prospěch účastníků silničního provozu;
a může také znamenat sběr (anonymních) dat za účelem jejich využití ve prospěch účastníků silničního provozu.
C-ITS jako celek má funkci, která umožňuje takovou "kooperativní" a „kolaborativní“ výměnu dat či kolaborativní řízení nebo podřízené rozhodování, s cílem poskytovat aplikační služby jednomu nebo více aktérům silničního provozu.
C-ITS může fungovat nejméně v pěti základních režimech komunikace:
Přímý vozidlo-vozidlo
ITS stanice na jiné ITS stanice
Vozidla pro aplikační služby na poskytovatele aplikačních služeb
Prostřednictvím centra (back office)
Mezi "jádrem" systémů nebo "aplikacemi"
5.2 Subjekty zapojené do C-ITS poskytování služeb
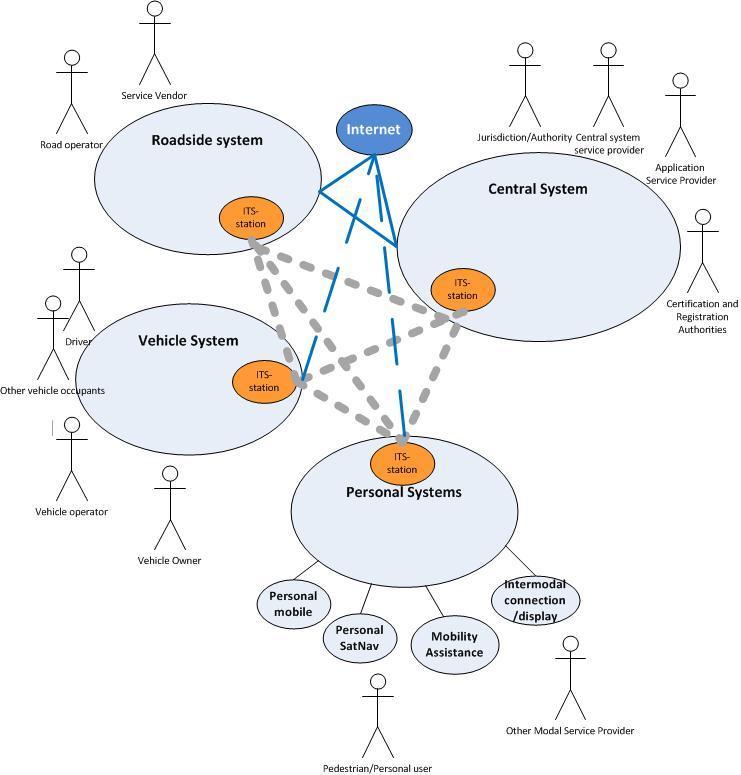
Kapitolu je možné představit pomocí obrázku č. 1, který ukazuje pohled na poskytování služeb C-ITS. Schématický obrázek ukazuje ITS stanice, které leží nejen v centrálním systému, ale i u ostatních ITS služeb. Poskytování ITS stanice může být připojeno přes celou řadu bezdrátových médií nebo přímo přes internet. Ze schématu je zřejmé, že každá stanice může komunikovat a sdílet data s dalšími stanicemi v okolí na základě sdílených informací. Velmi často bude docházet i k paralelním strukturám s několika centrálními, které na sebe budou působit a vzájemně se ovlivňovat a kooperovat. Toto je v obrázku naznačeno čerchovanou šedivou čárou a jednotlivé systémy je možné i několikanásobně duplikovat.
Pro lepší představu je systém C-ITS komplexně zobrazen na obrázku č. 2: Jedná se o aktualizace použité v CVIS, který je využit v ISO 21217.

Hlavními komponenty systému jsou tedy:
Aplikace - které poskytují funkce zvýšení bezpečnosti, mobility a přínosu pro životní prostředí
Vybavená vozidla - vozidla vybavená komunikací a sběrem dat pro zpracování kapacity v C-ITS
Vybavené osoby - osoby s mobilními telefony, tablety nebo se zařízením s podobným typem komunikace a sběrem dat.
Komunikace - umožňuje výměnu dat, včetně komunikace ITS-stanice
Základní systémy - poskytují potřebné funkce, aby mohla proběhnout výměna dat mezi stacionárními a mobilními účastníky dopravy
Podpůrné systémy - obsahují bezpečnostní pověření certifikačních a registračních autorit, které umožní zařízením a systémům navázat zabezpečené spojení
6 Rámcový přehled C-ITS systémů
Kapitola obsahuje přehled a popis jednotlivých systémů, které používají kooperativní inteligentní dopravní systémy. Příkladem jsou následující řešení:
Komunikace
Systémy ve vozidle
Silniční systémy
Ukládání dat
Jádro systému C-ITS atd.
7 Shrnutí rámcového přehledu
Kapitola předkládá sumární přehled k přístupům kooperativních systémů ITS. Základní technologická platforma s řídícím jádrem systému musí mít velmi dobře definované vlastní technologie systému, rozhraní procesů, které zajistí bezpečný, stabilní a interoperabilní spolehlivý systém, který bude minimalizovat riziko a maximalizovat příležitosti v následujících oblastech:
Kooperativní vozidla a technologie dálničního systému
Kooperativní vozidla a aplikace dálničního systému
Úspěšná platforma C-ITS se bude rozvíjet, pokud bude splňovat řadu přísných kritérií například:
Platforma bude muset počítat s nárůstem, rozšiřitelností a začleněním nově se vyvíjejících technologií.
Inovativní firmy soukromého sektoru budou moci vyvíjet nové aplikace, které nejsou dosud známy, ale v budoucnu půjdou efektivně uplatnit.
Příloha A (informativní) – ISO 14813-1 Domény služeb a služby ITS
Tato příloha uvádí soupis služeb v rámci C-ITS, které vychází z normy ISO 14813-1 a pro přehlednost dokresluje obsah normy. Tabulka uvedená v příloze popisuje strukturu přiřazení služby ke každé vybrané skupině.